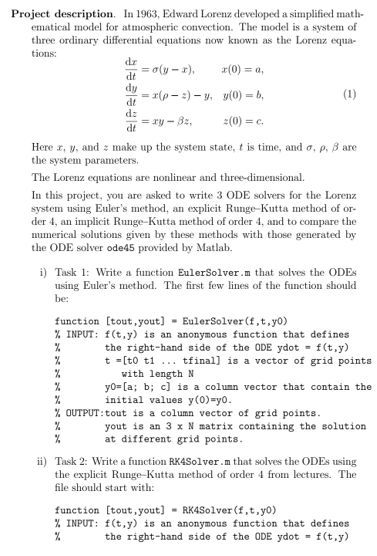
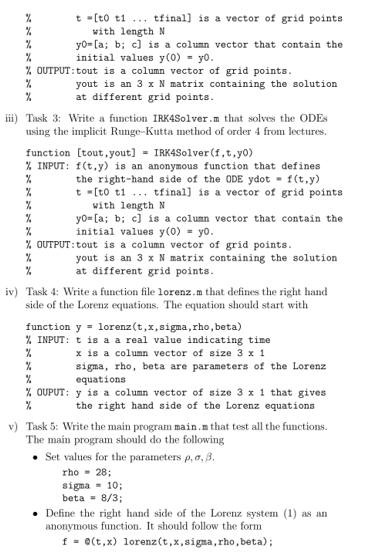
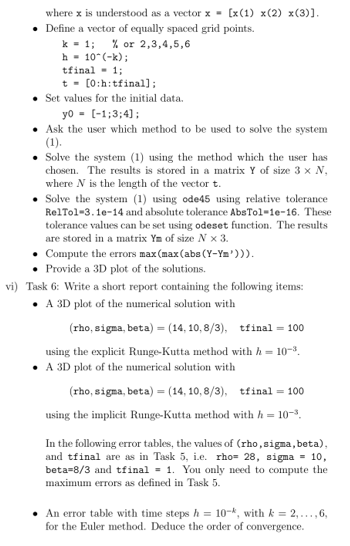
Instructions
Requirements and Specifications
Source Code
EULER SOLVER
function [tout, yout] = EulerSolver(f, t, y0)
% get number of points
N = length(t);
% Get step
h = t(2)-t(1);
m = length(y0);
% Define the matrix of size mxN where m is the number of variables
yout = zeros(m,N);
tout = t;
% Set the initial condition
yout(:,1) = y0;
% Now, calculate the rest of points
for i = 2:N
Ynew = yout(:,i-1) + h*f(t(i), yout(:,i-1));
yout(:,i) = Ynew;
end
end
IRK4 SOLVER
function [tout, yout] = IRK4Solver(f, t, y0)
% get number of points
N = length(t);
% Get step
h = t(2)-t(1);
m = length(y0);
% Define the matrix of size mxN where m is the number of variables
yout = zeros(m,N);
tout = t;
% Set the initial condition
yout(:,1) = y0;
% Now, calculate the rest of points
options = optimset('Display', 'Off');
for i = 2:N
[x, fval, ex] = fsolve(@(vars)solver(vars, t(i), f, yout(:,i-1), h), yout(:,i-1), options);
% Calculate terms
% k1 = f(t(i), yout(:,i-1));
% k2 = f(t(i) + 0.5*h, yout(:,i-1)+0.5*k1*h);
% k3 = f(t(i) + 0.5*h, yout(:,i-1) + 0.5*k2*h);
% k4 = f(t(i) + h, yout(:,i-1) + k3*h);
% yout(:,i) = yout(:,i-1) + (h/6)*(k1 + 2*k2 + 2*k3 + k4);
yout(:,i) = x;
end
function ff = solver(vars, t, f, varsold, h)
k1 = f(t, vars);
k2 = f(t + 0.5*h, vars + 0.5*k1*h);
k3 = f(t + 0.5*h, vars + 0.5*k2*h);
k4 = f(t + h, vars + k3*h);
ff = vars - varsold - (h/6)*(k1 + 2*k2 + 2*k3 + k4);
end
end
LORENZ
function y = lorenz(t, x, sigma, rho, beta)
dxdt = sigma*(x(2)-x(1));
dydt = x(1)*(rho - x(3)) - x(2);
dzdt = x(1)*x(2) - beta*x(3);
y = [dxdt;dydt;dzdt];
end
RK4 SOLVER
function [tout, yout] = RK4Solver(f, t, y0)
% get number of points
N = length(t);
% Get step
h = t(2)-t(1);
m = length(y0);
% Define the matrix of size mxN where m is the number of variables
yout = zeros(m,N);
tout = t;
% Set the initial condition
yout(:,1) = y0;
% Now, calculate the rest of points
for i = 2:N
% Calculate terms
k1 = f(t(i), yout(:,i-1));
k2 = f(t(i) + 0.5*h, yout(:,i-1)+0.5*k1*h);
k3 = f(t(i) + 0.5*h, yout(:,i-1) + 0.5*k2*h);
k4 = f(t(i) + h, yout(:,i-1) + k3*h);
yout(:,i) = yout(:,i-1) + (h/6)*(k1 + 2*k2 + 2*k3 + k4);
end
end