Instructions
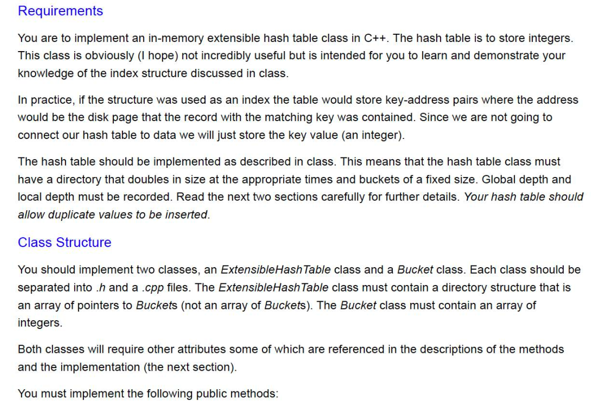
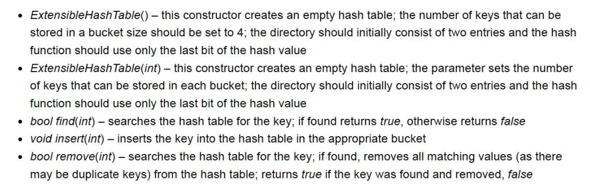
Requirements and Specifications
Source Code
#include "ExtensibleHashTable.h"
#include
#include
#include
using namespace std;
// Create a hash table
ExtensibleHashTable::ExtensibleHashTable(int bucketCapacity)
{
globalDepth = 1;
capacity = 2;
this->bucketCapacity = bucketCapacity;
// Initialize 1 bucket which is pointed by 2 addresses
buckets = new Bucket*[capacity];
buckets[0] = new Bucket(globalDepth, bucketCapacity);
buckets[1] = buckets[0];
}
// Copy constructor
ExtensibleHashTable::ExtensibleHashTable(const ExtensibleHashTable &other)
{
copy(other);
}
// Delete all pointers
ExtensibleHashTable::~ExtensibleHashTable()
{
dispose();
}
// Copy assignment operator
ExtensibleHashTable &ExtensibleHashTable::operator = (const ExtensibleHashTable &other)
{
if (this == &other)
return *this;
dispose();
copy(other);
return *this;
}
// Insert a new value
void ExtensibleHashTable::insert(int element)
{
int hashIndex = element % capacity;
// Do regular insertion as long as it is not full
if (!buckets[hashIndex]->isFull())
{
buckets[hashIndex]->insert(element);
return;
}
// Check if all of the elements in the bucket are the same as element (e.g. all duplicate)
// we need to throw an exception because this will cause
// infinite splitting of buckets
if (buckets[hashIndex]->countOccurrence(element) == bucketCapacity)
throw runtime_error("Oh snap bucket is filled with all identical values.");
// If it is full, we need to double the capacity if the local depth is equal to the global depth,
// otherwise we just do split buckets to the other half
if (buckets[hashIndex]->getLocalDepth() >= globalDepth)
{
int newCapacity = capacity * 2;
// The new table's global depth increases and to be used
// as basis for local depths of new buckets
globalDepth++;
Bucket **newBuckets = new Bucket*[newCapacity];
// Retain the original buckets for the first half, those that are new will have new empty buckets
for (int i = 0, j = capacity / 2; i < capacity / 2; i++, j++)
{
if (buckets[j] == buckets[i])
buckets[j] = new Bucket(globalDepth, bucketCapacity);
}
// Move the buckets to the new hash table
for (int i = 0; i < capacity; i++)
newBuckets[i] = buckets[i];
// The last half mirrors the buckets of the first half of the new hash table
for (int i = capacity, j = 0; i < newCapacity; i++, j++)
newBuckets[i] = newBuckets[j];
newBuckets[hashIndex]->increaseLocalDepth();
// The hash entry that has been fully filled, will need to have its contents re-hashed
int newBucketIndex = capacity + hashIndex;
newBuckets[newBucketIndex] = new Bucket(globalDepth, bucketCapacity);
int numElements = newBuckets[hashIndex]->size();
int *elements = new int[numElements];
int k = 0;
while (!newBuckets[hashIndex]->isEmpty())
elements[k++] = newBuckets[hashIndex]->popFront();
for (k = 0; k < numElements; k++)
newBuckets[elements[k] % newCapacity]->insert(elements[k]);
delete[] elements;
// Finally put the new value into the new table
newBuckets[element % newCapacity]->insert(element);
// Delete and replace the old
delete[] buckets;
buckets = newBuckets;
capacity = newCapacity;
}
else
{
// So in here we split the bucket, no expansion of hash table
int newBucketIndex = hashIndex + (capacity / 2);
buckets[newBucketIndex] = new Bucket(globalDepth, bucketCapacity);
// The hash entry that has been fully filled, will need to have its contents re-hashed
int numElements = buckets[hashIndex]->size();
int *elements = new int[numElements];
int k = 0;
while (!buckets[hashIndex]->isEmpty())
elements[k++] = buckets[hashIndex]->popFront();
for (k = 0; k < numElements; k++)
buckets[elements[k] % capacity]->insert(elements[k]);
delete[] elements;
// Finally put the new value into the new table
buckets[element % capacity]->insert(element);
}
}
// Print the content of the hash table
void ExtensibleHashTable::print()
{
// Print the first half
for (int i = 0; i < capacity / 2; i++)
{
cout << i << ": " << buckets[i] << " --> ";
buckets[i]->print();
cout << endl;
}
// The second half of the hash table next, which usually mirrors the first half
for (int i = 0, j = capacity / 2; i < capacity / 2; i++, j++)
{
cout << j << ": " << buckets[j] << " --> ";
// No printing is necessary if it's a reflection of the last half
if (buckets[j] != buckets[i])
buckets[j]->print();
cout << endl;
}
}
// Find the element if it's on the table
bool ExtensibleHashTable::find(int element)
{
int hashIndex = element % capacity;
return buckets[hashIndex]->find(element);
}
// Remove all occurrence of the element
bool ExtensibleHashTable::remove(int element)
{
int hashIndex = element % capacity;
return buckets[hashIndex]->remove(element);
}
// Copy (deep copy) another hash table
void ExtensibleHashTable::copy(const ExtensibleHashTable &other)
{
globalDepth = other.globalDepth;
capacity = other.capacity;
bucketCapacity = other.bucketCapacity;
buckets = new Bucket*[capacity];
// Initialize the space for first half, the first half always have their own buckets
// The second half, points to the buckets on the first half in parallel only if
// it wasn't split
for (int i = 0, j = capacity / 2; i < capacity / 2; i++, j++)
{
buckets[i] = other.buckets[i]->copy();
if (other.buckets[j] != other.buckets[i])
buckets[j] = other.buckets[j]->copy();
else
buckets[j] = buckets[i];
}
}
// Delete everything
void ExtensibleHashTable::dispose()
{
for (int i = 0, j = capacity / 2; i < capacity / 2; i++, j++)
{
if (buckets[i] != buckets[j])
{
delete buckets[i];
delete buckets[j];
}
else
{
delete buckets[i];
}
}
delete[] buckets;
}